
皆さん、ロボットはどのような部品で作られていると想像できるでしょうか?
結論から言うと、基本的な構成要素は「センサー」と「コンピューター」、「アクチュエータ」となります。「センサー」と「コンピューター」はなんとなくわかりますが、「アクチュエータ」って何?と思ったのではないでしょうか?「アクチュエータ」とは、動力源と機構部品を組み合わせて、機械的な動作を行う装置のことであり、例えばモータもアクチュエータの一種になります。
もう少し、理解しやすいように人間の器官に例えて説明します。まず、「センサー」は人間でいうと目とか鼻とか耳とか五感を感じることができる器官に相当します。次に、「コンピューター」は人間でいうと考えることができる脳に相当します。最後に「アクチュエータ」は人間でいうと腕を曲げたり伸ばしたりできる筋肉や関節に相当します。

下の表で理解するとわかりやすいよ!
| ロボット | 人間 | 役割 |
| センサー | 感覚器官(目や耳など) | 感じる |
| コンピューター | 脳 | 考える |
| アクチュエータ | 筋肉や関節 | 動かす |
ロボット君の挙動を実際に見てみよう!
ここで実際のロボットの挙動を通して、「センサー」と「コンピューター」、「アクチュエータ」の役割を理解するためにロボット君に登場してもらいましょう!
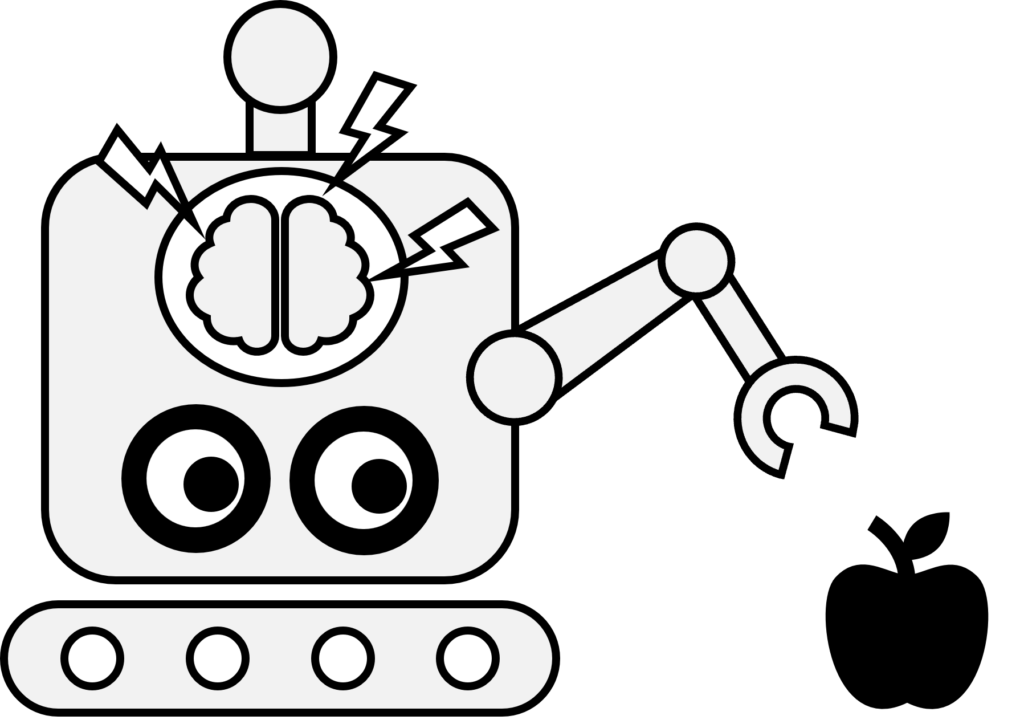
ロボット君がリンゴをとるとき、どのようにリンゴをとるのでしょうか?
ロボット君とは親戚です。
センサー(感じる)
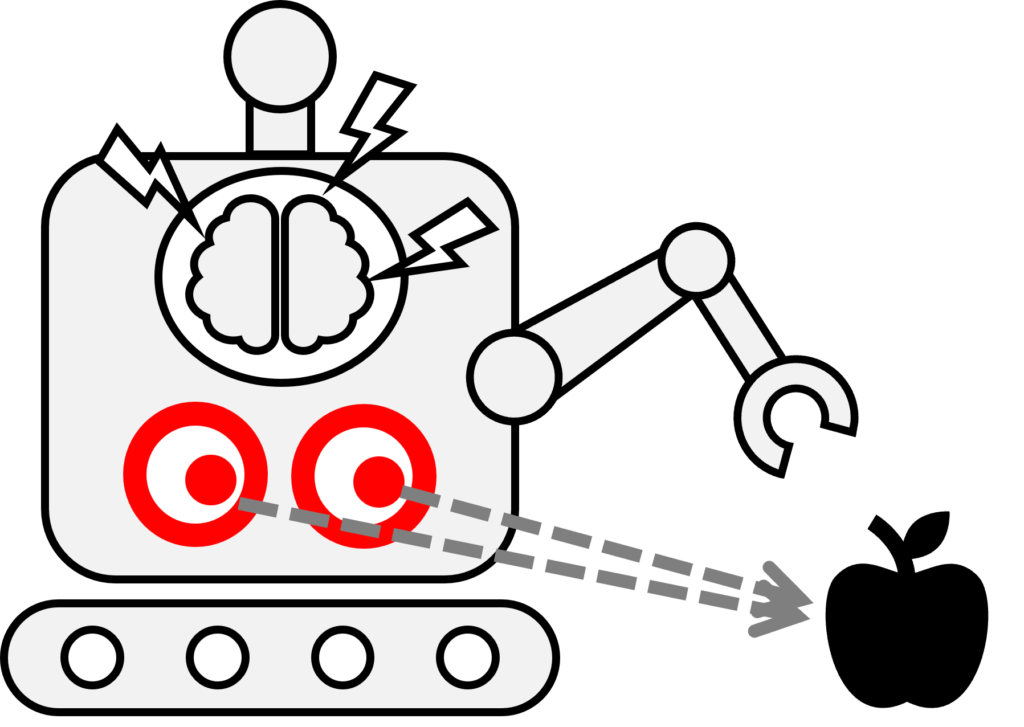
ロボット君が自分の目(センサー)でリンゴがどれくらいの位置にあるのかを確認しています。
コンピューター(考える)
ロボット君が自分の脳(コンピューター)で、先ほど取得したリンゴの位置データから自分の関節(アクチュエータ)をどれくらい動かせば、リンゴをとることができるのかを考えます。そして、自分の関節(アクチュエータ)に指令を出します。
アクチュエータ(動かす)
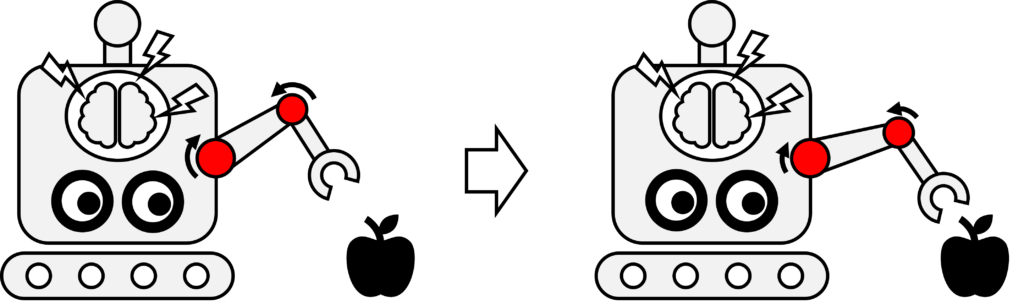
ロボット君が自分の脳(コンピューター)から出された指令をもとに、自分の関節(アクチュエータ)を動かします。そして、リンゴをとることができるのです。
リンゴはスタッフで美味しく頂きました、、、。
まとめ
どうでしょうか?ロボットの基本的な構成要素を理解できたでしょうか?
こうして、ロボットの挙動から構成要素を考えると、構成要素の役割が明確になりますよね。とりあえず、この記事では、ロボットの構成要素は3つあって、1つ目は感じるためのセンサー、2つ目は考えるためのコンピューター、3つ目は動かすためのアクチュエータと覚えていただければ幸いです。